I will be working on several ongoing projects, such as long-term visual place recognition, multi-object tracking and association, and fruit segmentation and tracking for agricultural robotics.
I will be working on several ongoing projects, such as long-term visual place recognition, multi-object tracking and association, and fruit segmentation and tracking for agricultural robotics.
Wishing the lab continued success and innovation! 🚀.

I worked with several ongoing projects such as AR/VR, Multi-agent robotics for agriculture, Painting / pre-surface inspection robotics for constructions at C3 Robotics Lab, Chinese University Robotics Institute (CURI), CUHK.
]]>I emphasize taking the voluntary initiative by the tech industry first. Companies should realize that they need academic involvement to grow at a swift pace. Most VPs of big companies belong to academia. In return, companies would at least solve their quality hiring problems. Usually, universities need more funding for R&D and IP filings, etc. In a broader view, both could get huge benefits.
#ITCNASIA #zong #jazz #Gispp #InformationSecurity #CyberSecurity #ITCNAsia2023 #ITCNAsia #ITCN

I’m thankful to the Global Information Security Society for Professionals of Pakistan(GISPP), Shahzad Subhani, and Awais Rasheed, for having me as a panelist for the Session “Navigating Academia Research & Industry” at ITCN Asia 2023 at PAK-China Friendship Centre, Islamabad.



Robot Navigation Obstacle Avoidance
: PDF
Abstract: Collision-free navigation of mobile robots is a challenging task, especially in unknown environments, and various studies have been carried out in this regard. However, the previous studies have shortcomings, such as low performance in cluttered and unknown environments, high computational costs, and multiple controller models for navigation. This paper proposes an adaptive neuro-fuzzy inference system (ANFIS) and global positioning system (GPS) for control and navigation to overcome these problems. The proposed method automates the navigation of a mobile robot while averting obstacles in unknown and densely cluttered environments. Furthermore, the mobile robots’ global path planning and steering are controlled using GPS and heading sensor data fusion to achieve the target coordinates. A fuzzy inference system (FIS) is adopted to model obstacle avoidance where distance sensors data is converted into fuzzy linguistics. Moreover, a type-1 Takagi–Sugeno FIS is used to train a five-layered neural network for the local planning of the robot, and ANFIS parameters are tuned using a hybrid learning method. In addition, an algorithm is designed to generate a dataset for testing and training the ANFIS controller. All the testing and training are conducted in MATLAB, while simulations are carried out using CoppeliaSim. Comprehensive experiments are performed to validate the robustness of the proposed method. The results of the experiments show that the proposed approach outperforms various state-of-the-art neuro-fuzzy, CS-ANFIS, multi-ANFIS, and hybrid ANFIS navigation and obstacle avoidance methods in finding a near-optimal path in unknown environments.
@article{HAIDER20229060,
title = {Robust mobile robot navigation in cluttered environments based on hybrid adaptive neuro-fuzzy inference and sensor fusion},
journal = {Journal of King Saud University - Computer and Information Sciences},
volume = {34},
number = {10, Part B},
pages = {9060-9070},
year = {2022},
issn = {1319-1578},
doi = {https://doi.org/10.1016/j.jksuci.2022.08.031},
url = {https://www.sciencedirect.com/science/article/pii/S1319157822003135},
author = {Muhammad Husnain Haider and Zhonglai Wang and Abdullah Aman Khan and Hub Ali and Hao Zheng and Shaban Usman and Rajesh Kumar and M. Usman Maqbool Bhutta and Pengpeng Zhi},
keywords = {ANFIS, GPS, Mobile robot, Obstacle avoidance, Autonomous navigation}}
Road Inspection Deep Learning
: PDF
Abstract: Road potholes can cause discomforts to passengers and even traffic accidents to vehicles. Accurate segmentation of road potholes is an important capability for autonomous vehicles to ensure safe driving. Some methods on road-pothole segmentation use single-modal data (i.e., RGB images). The main challenge faced by these methods is that the visual appearance of road potholes is often close to road areas, making these networks difficult to distinguish them. Recent methods resort to fusing RGB images with depth/disparity images for pothole segmentation. However, their performance is still not satisfactory in real-world applications. To achieve superior results, this article proposes a novel data fusion network for road-pothole segmentation, where a channel attention fusion module and a dual attention fusion (DAF) module are designed to hierarchically fuse the RGB and disparity data. We evaluate our proposed network using a public dataset, and the experimental results demonstrate the superiority over the state-of-the-art networks.
@ARTICLE{9864311,
author={Feng, Zhen and Guo, Yanning and Liang, Qing and Usman Maqbool Bhutta, M. and Wang, Hengli and Liu, Ming and Sun, Yuxiang},
journal={IEEE Transactions on Instrumentation and Measurement},
title={MAFNet: Segmentation of Road Potholes with Multi-modal Attention Fusion Network for Autonomous Vehicles},
year={2022},
volume={},
number={},
pages={1-1},
doi={10.1109/TIM.2022.3200100}}
Robot Navigation Obstacle Avoidance
: PDF
Abstract: Navigation of autonomous robots in unknown and cluttered environments lies among the marked trends in robotics. Unlike animals and humans, the collision-free movement of a robot is challenging and requires processing complex information. An autonomous robot needs to cope with a large amount of uncertainty while navigating. The previous methods have limitations, such as lacking obstacle avoidance behaviour, having a large number of governing rules, designing a separate controller for each navigation and obstacle avoidance, not considering the robot’s dynamics, computationally expensive training, and poor performance in a cluttered environment. This paper proposes a method that comprises a single adaptive neuro fuzzy inference system (ANFIS) based controller with 16 rules compared to hundred of rules used by previous methods to address such problems. Our method takes heading angle along with distance sensors data as input. AU the inputs are fuzzified into linguistic variables such as near-far and left-right. Additionally, a fuzzy inference system (FIS) is designed and trained using the generated dataset for optimum performance of ANFIS. The proposed method efficiently provides collision-free navigation of the mobile robot in densely cluttered environments. Comprehensive experiments are performed to prove the robustness and potency of the proposed ANFIS controller. Moreover, the performance of the proposed method is compared with various previous methods. The results of these comparisons indicate our proposed method’s superiority in finding a near-optimal path.
@INPROCEEDINGS{bhutta22FuzzyconfNavigation,
author={Haider, Muhammad Husnain and Ali, Hub and Khan, Abdullah Aman and Zheng, Hao and Bhutta, M. Usman Maqbool and Usman, Shaban and Zhi, Pengpeng and Wang, Zhonglai},
booktitle={2022 International Conference on Innovations and Development of Information Technologies and Robotics (IDITR)},
title={Autonomous Mobile Robot Navigation using Adaptive Neuro Fuzzy Inference System},
year={2022},
volume={},
number={},
pages={93-99}
doi={10.1109/IDITR54676.2022.9796495}}
Abstract: Deep learning-based image retrieval techniques for the loop closure detection demonstrate satisfactory performance. However, it is still challenging to achieve high-level performance based on previously trained models in different geographical regions. This paper addresses the problem of their deployment with simultaneous localization and mapping (SLAM) systems in the new environment. The general baseline approach uses additional information, such as GPS, sequential keyframes tracking, and re-training the whole environment to enhance the recall rate. We propose a novel approach for improving image retrieval based on previously trained models. We present an intelligent method, \textit{MAQBOOL}, to amplify the power of pre-trained models for better image recall and its application to real-time multiagent SLAM systems. We achieve comparable image retrieval results at a low descriptor dimension (512-D), compared to the high descriptor dimension (4096-D) of state-of-the-art methods. We use spatial information to improve the recall rate in image retrieval on pre-trained models.
:ledger: HKUST 29th Congregation 2021 Booklet








Thesis Title: TOWARDS A SWIFT MULTIAGENT SLAM SYSTEM FOR LARGE-SCALE ROBOTICS APPLICATIONS by Muhammad Usman Maqbool BHUTTA
]]>Date (HKT): 26 to 30 July 2021
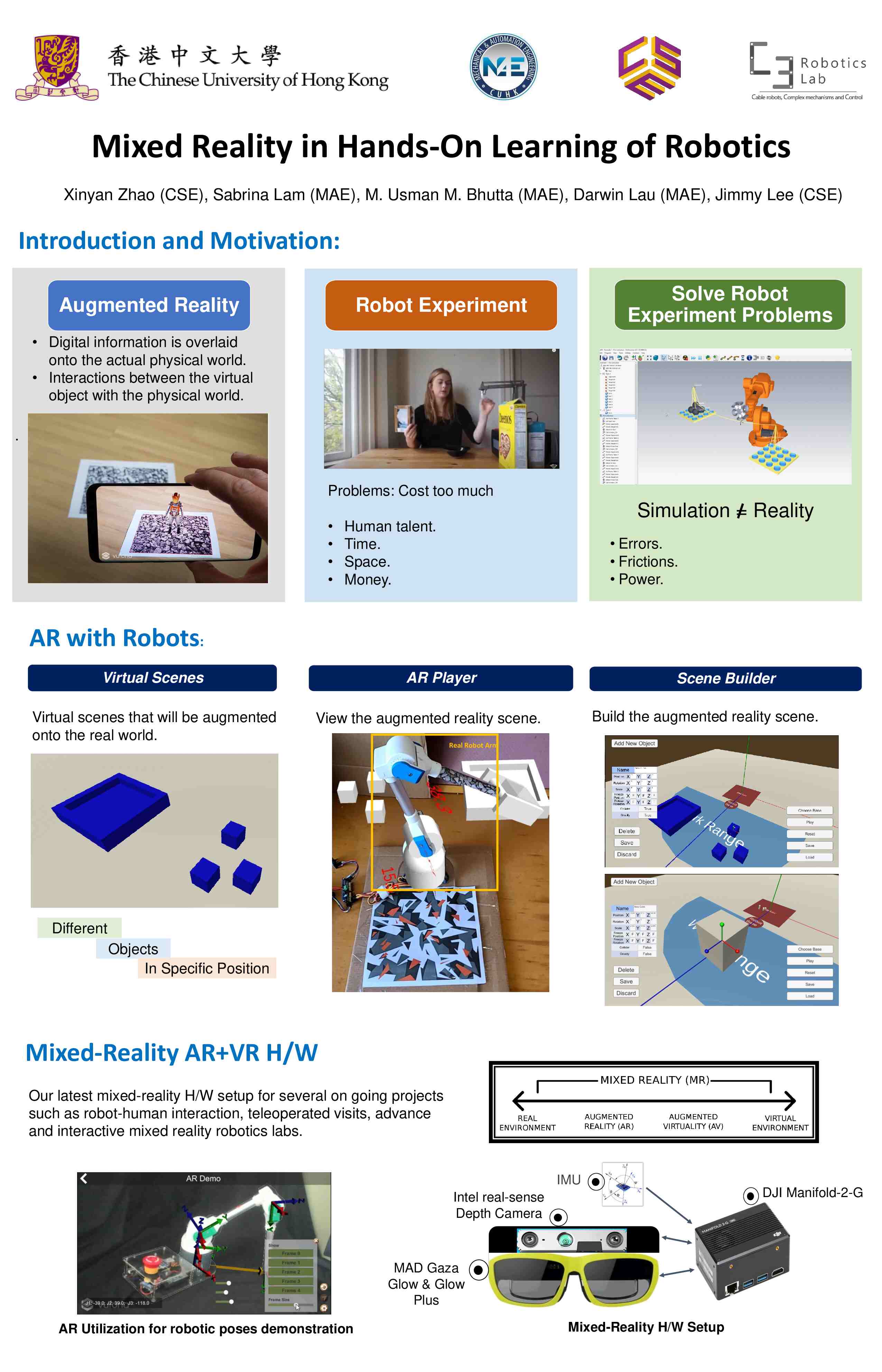
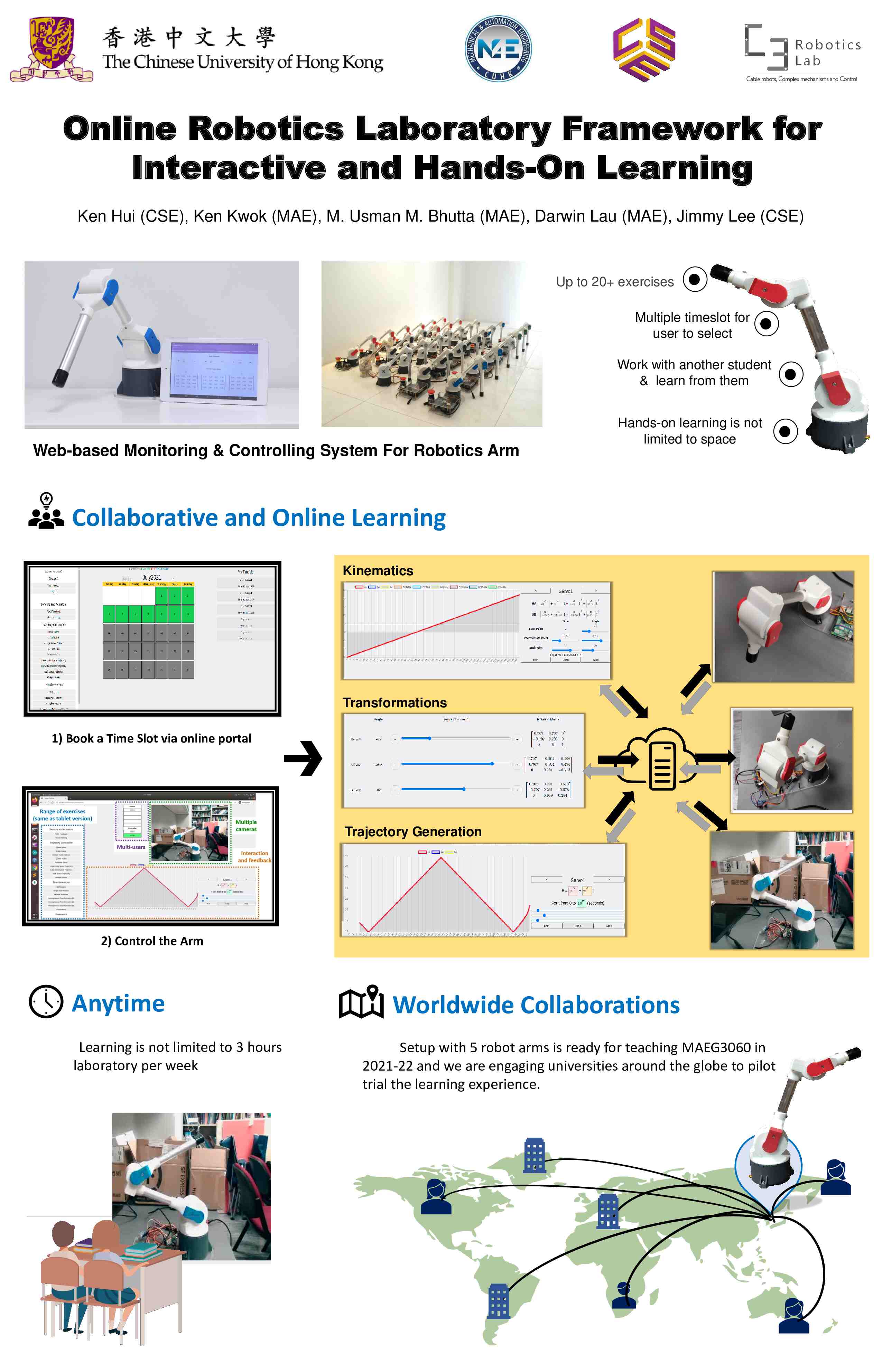
We presented two posters in this events.
We’ve won :trophy: Educational Technology Innovation: Gold Award for our mixed-reality work. Our second poster also got :trophy: Pedagogical Innovation: Silver Award in this expo. Link
By: Xinyan Zhao (CSE), Sabrina Lam (MAE), Dr. M. Usman M. Bhutta (MAE), Prof. Darwin Lau (MAE), Prof. Jimmy Lee (CSE)
By: Ken Hui (CSE), Ken Kwok (MAE), Dr. M. Usman M. Bhutta (MAE), Prof. Darwin Lau (MAE), Prof. Jimmy Lee (CSE)
I will be working to several ongoing projects such as AR/VR, Multi-agent robotics for agriculture, Painting / pre-surface inspection robotics for constructions at C3 Robotics Lab, Chinese University Robotics Institute (CURI), CUHK.
